Bolygónk leggyakoribb és legrezisztensebb élőlényei közé tartozó fonálférgek egyes fajai betegségeket is terjeszthetnek és parazitaként élhetnek más élőlények szervezetében. Ugyanakkor vannak alfajai, amelyeket állattartó gazdák például természetes rovarirtóként használnak kártevők ellen. Az atlantai egyetem kutatói azonban ezeknek az apró szervezeteknek a mozgástechnikájára fókuszáltak, amellyel a gazdatesthez csatlakoznak. A kutatók nagy sebességű kamerákkal figyelték meg, hogy az orsósférgek hogyan pozícionálják testüket az irányított előrelendüléshez.
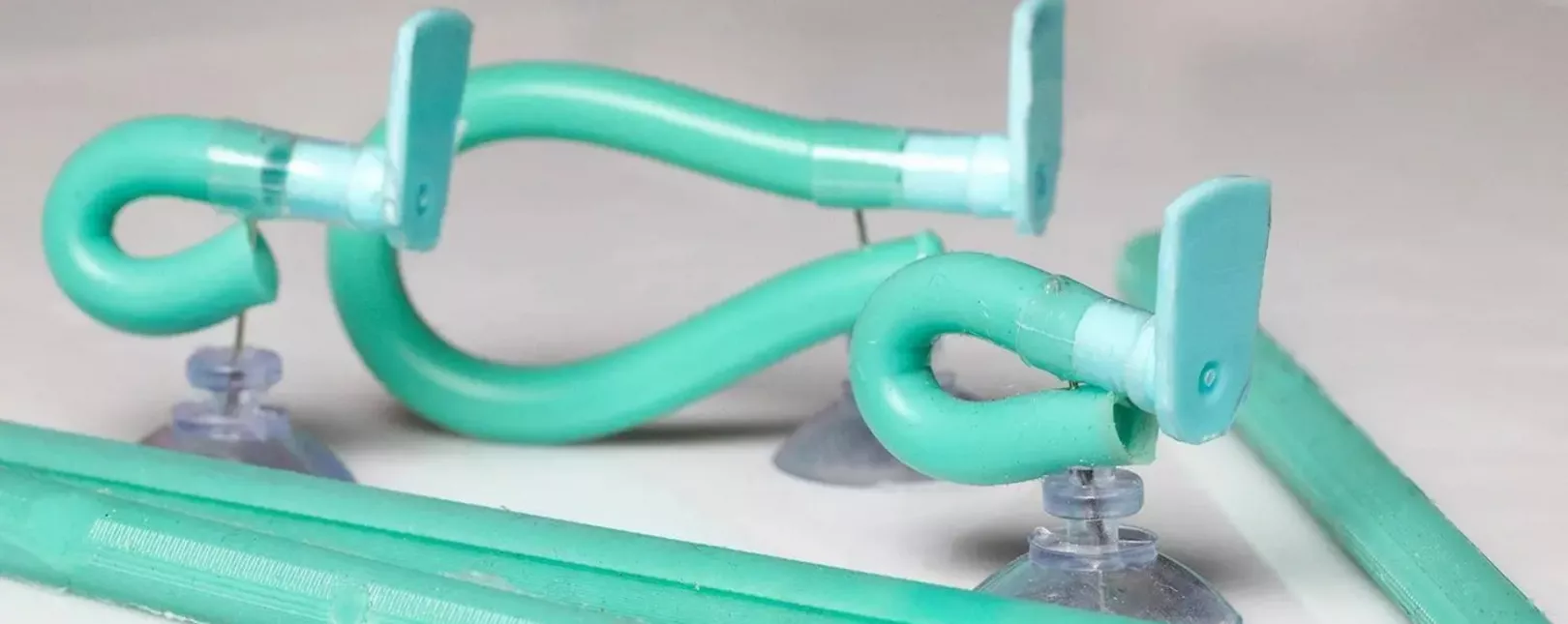
Numerikus modellezéssel különféle testhelyzeteket vizsgáltak, és egy úgynevezett fázistérképet hoztak létre, amely virtuálisan köti össze a kiinduló testformákat a későbbi ugrási pályákkal. A kiindulási pozíciók változtatásával az ugrás iránya is szabályozható, a robot pedig a fonálféreg sajátos „öncsípő” mozdulatát utánozva előre vagy hátra lökve magát nekilódul az ugrásnak. A mérnökök egy kb. 13 cm hosszú, szilikonrúdból és szénszálas gerincből álló úgynevezett „puha ugró modellt” (Soft Jumping Model) hoztak létre.

Az új mechanika rugalmas és agilis jellege lehetőségeket nyit a homokos vagy strukturálatlan talajon való biztonságos mozgásra. „Nemrég indítottak a Holdra egy ugró robotot, és más hasonló robotokat fejlesztenek kutató-mentő feladatokra is, ahol kiszámíthatatlan terepen és akadályokon kell átkelniük” – mondta Sunny Kumar, a Georgia Tech Vegyészeti és Biomolekuláris Mérnöki Karának posztdoktori kutatója és a tanulmány egyik vezető szerzője.
Forrás: Interesting Engineering
Borítókép forrása: Georgia Tech
