
A világ egyik vezető automatizálási és technológiai vállalata több mint 15 éve vizsgálja a repülést. Céljuk, hogy a biológiai modellekből tanulva saját technológiát hozzanak létre. Most először fejlesztettek ki olyan repülő tárgyat, amely nagy számban és teljesen önállóan, rajban képes repülni. Noha ezt a mondatot könnyű kimondani, nagyon komoly technológiai fejlesztés áll mögötte. Lássuk a részleteket!
A BionicBee 34 gramm, 22 centiméter hosszú és 24 centiméter a szárnyfesztávolsága. A fejlesztők először alkalmazták a generatív tervezést: néhány paraméter megadása után a szoftver meghatározott tervezési elvek alapján megtalálta az optimális szerkezetet, hogy a lehető legkevesebb anyagot használja fel a lehető legstabilabb konstrukció mellett. Ez a könnyűszerkezetes felépítés döntő fontosságú a jó manőverezőképesség és a repülés időtartama szempontjából.
Funkcióintegráció szűk beépítési helyen
A méhtest tartalmazza a csapkodó szárnymechanizmus kompakt konstrukcióját, a kommunikációs technológiát, valamint a szárnycsapkodás és a szárnygeometria adaptálását. Nagyon szűk helyen helyezték el a kefe nélküli motort, a három szervomotort, az akkumulátort, a hajtóművet, valamint a különböző nyomtatott áramköri lapokat. A motorok és a mechanika intelligens együttműködése teszi lehetővé például a szárnycsapás frekvenciájának pontos beállítását a különböző manőverekhez.
A mesterséges méh 15–20 szárnycsapási gyakorisággal repül. Eközben a szárnyak 180 fokos szögben csapkodnak előre-hátra. A kefe nélküli motor egy precízen vezetett, ultrakönnyű, mechanikus szerkezeten keresztül, holtjátékmentesen hajtja a szárnycsapásokat. Minél nagyobb a sebesség, annál nagyobb a csapási frekvencia és a felhajtóerő. A szárny tövénél lévő három szervomotor célzottan változtatja meg a szárny geometriáját, így növelve a hatékonyságot bizonyos szárnypozíciókban, és célzottan módosítva a létrehozott felhajtóerőt.
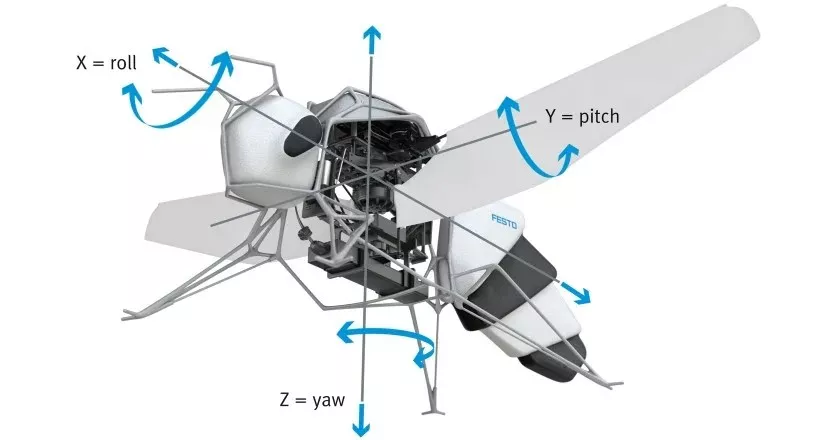
Ha a méhnek előre kell repülnie, úgy kell beállítani a geometriát, hogy a szárny hátsó helyzetében nagyobb legyen a felhajtóerő, mint az elülső helyzetben. Ennek hatására a test előrebillen (pitch), és a méh előrefelé repül. Ha a geometria úgy van beállítva, hogy a jobb szárny nagyobb felhajtóerőt generál, mint a bal szárny, a méh a hossztengely körül balra fordul (roll), és oldalirányban repül. Egy másik lehetőség az, hogy úgy állítjuk be a szárnyakat, hogy az egyik szárny elől, míg a másik szárny hátul generáljon nagyobb felhajtóerőt. Ennek hatására a méh a függőleges tengelye körül forog-
A tíz méh autonóm viselkedése egy beltéri helymeghatározó rendszerrel valósul meg ultraszéles sávú technológiával (UWB). Ebből a célból nyolc UWB-horgonyt telepítettek a helyiség két szintjén. Ez lehetővé teszi a futási idő pontos mérését, így a méhek képesek meghatározni a helyüket a térben. Az UWB-horgonyok jeleket küldenek az egyes méheknek, amelyek egymástól függetlenül mérik a távolságot a mindenkori adóelemtől, és az időbélyegek alapján kiszámítják saját térbeli helyzetüket.
Minden méh kézzel készül, ezért már a legapróbb különbségek is befolyásolhatják a repülés közbeni viselkedést, emellett a méhek egy automatikus kalibráló funkcióval rendelkeznek: rövid próbarepülést követően minden méh meghatározza az egyedileg optimalizált vezérlő paramétereit. Ezáltal az intelligens algoritmus képes kiszámítani az egyes méhek közötti hardveres különbségeket, így az egész raj úgy irányítható, mintha minden méh ugyanolyan lenne.
